My research lies at the intersection of reinforcement learning, autonomous systems, and intelligent transportation. Below are my publications in peer-reviewed conferences and journals.
My research lies at the intersection of reinforcement learning, autonomous systems, and intelligent transportation. Below are my publications in peer-reviewed conferences and journals.
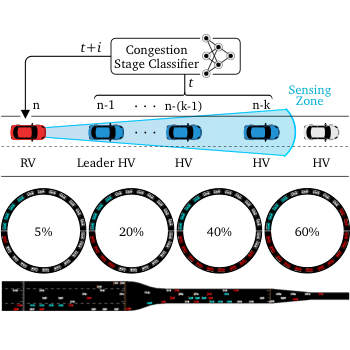
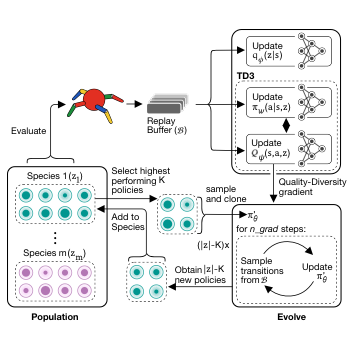
IROS 2025
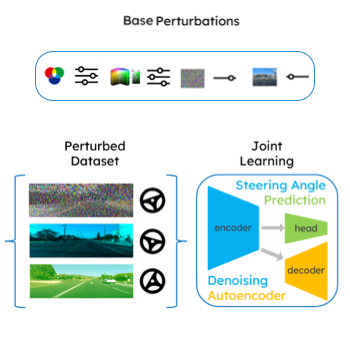
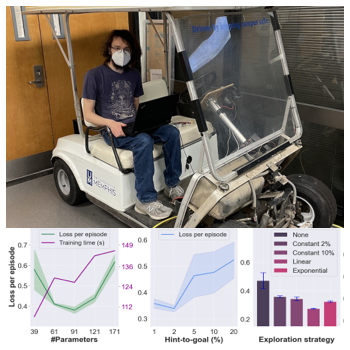
UbiComp 2025
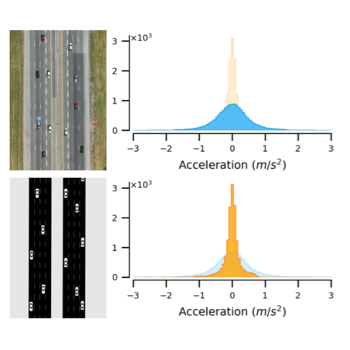
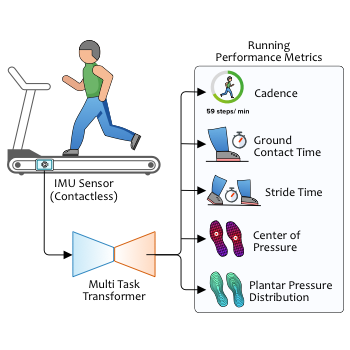
CHASE 2025